SSD实现 Part0-整体网络模型
VGG Backbone
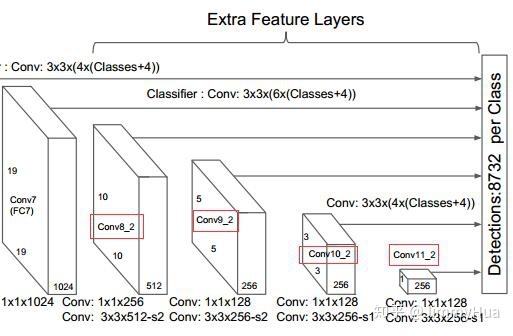
Extra Layers
Multi-box Layers
Part1-VGG Backbone
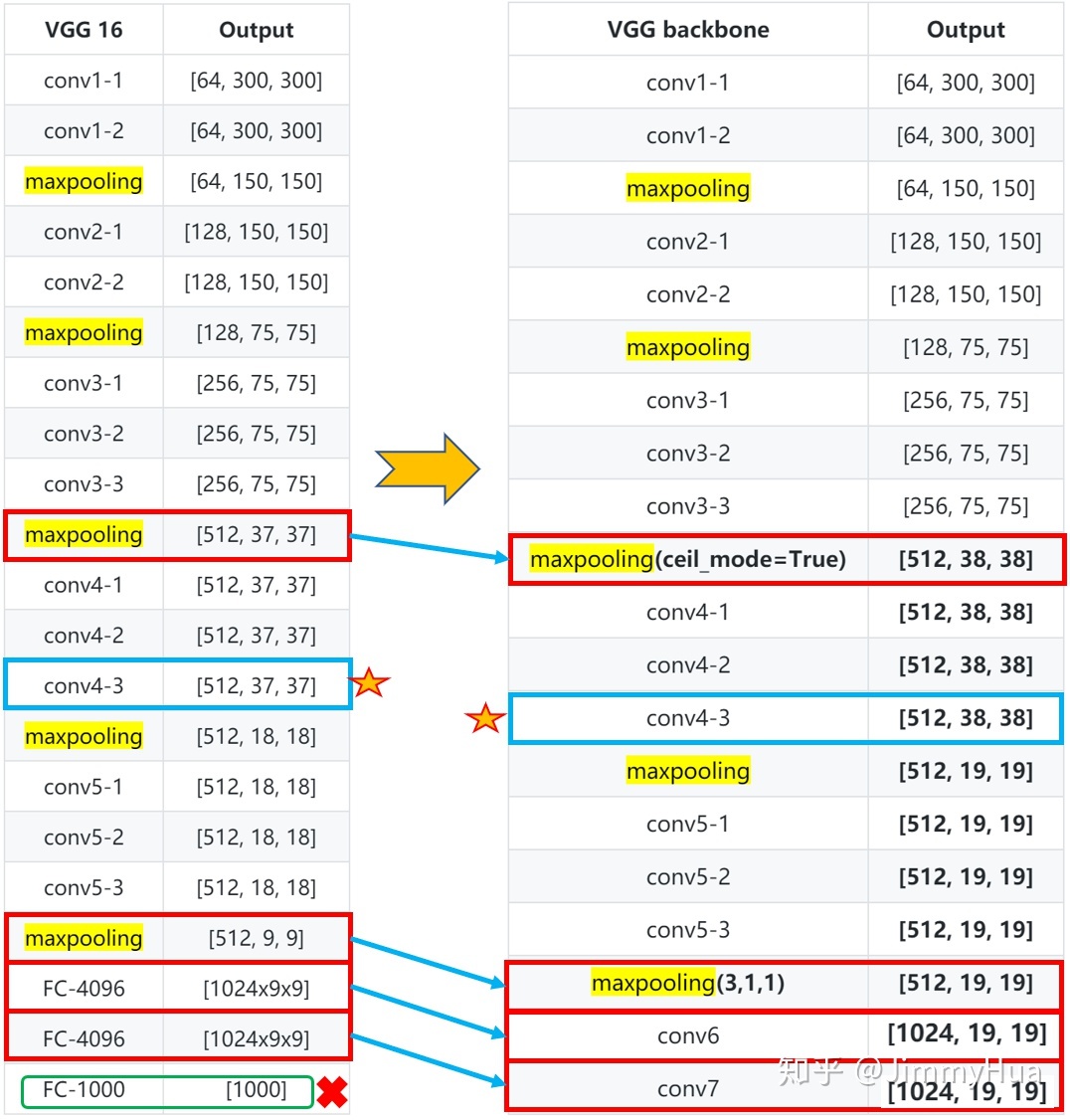
SSD首先使用了vgg16作为base网络,但做了一些小修改,即用卷积层替代vgg16原本的FC6,FC7两个全连接层。改动主要如下:
为了能够与在骨干网络之后增加特征提取层,将全连接层fc6和fc7转换为卷积层conv6和conv7 ,并对fc6和fc7的参数进行二次采样 ,并移除了fc8层 ;
将池化层pool5从2×2大小,步长为2更改为3×3大小,步长为1,并使用atrous算法来填充“漏洞”;
由于SSD网络结构移除了VGG16的全连接层,因此防止过拟合的dropout层也被移除 ;
由于conv4_3与其他特征层相比具有不同的特征比例,因此使用L2归一化 将特征图中每个位置的特征比例进行缩放,并在反向传播过程中学习该比例。
先写配置文件:(SSD分为300和512两个版本,这里以300为例)
1 2 3 4 5 vgg_base = { '300' : [64 , 64 , 'M' , 128 , 128 , 'M' , 256 , 256 , 256 , 'C' , 512 , 512 , 512 , 'M' , 512 , 512 , 512 ], '512' : [], }
然后按照配置填写vgg网络layer:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 def vgg (batch_norm=False ): cfg = vgg_base['300' ] in_channels = 3 layers = [] for v in cfg: if v == 'M' : layers += [nn.MaxPool2d(kernel_size=2 , stride=2 )] elif v == 'C' : layers += [nn.MaxPool2d(kernel_size=2 , stride=2 , ceil_mode=True )] else : conv2d = nn.Conv2d(in_channels, v, kernel_size=3 , padding=1 ) if batch_norm: layers += [conv2d, nn.BatchNorm2d(v), nn.ReLU(inplace=True )] else : layers += [conv2d, nn.ReLU(inplace=True )] in_channels = v pool5 = nn.MaxPool2d(kernel_size=3 , stride=1 , padding=1 ) conv6 = nn.Conv2d(512 , 1024 , kernel_size=3 , padding=6 , dilation=6 ) conv7 = nn.Conv2d(1024 , 1024 , kernel_size=1 ) layers += [pool5, conv6, nn.ReLU(inplace=True ), conv7, nn.ReLU(inplace=True )] return layers
用个小测试数据测试一下:
1 2 3 4 5 6 7 if __name__ == '__main__' : x = torch.randn(1 , 3 , 300 , 300 ) layers = vgg() for net in layers: x = net(x) print (x.shape)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 net_extras = { '300': [256, 'S', 512, 128, 'S', 256, 128, 256, 128, 256], '512': [], } # 返回一个extra的layer列表 def extra_net(): # Extra layers added to VGG for feature scaling layers = [] cfg = net_extras['300'] in_channels = 1024 flag = False for k, v in enumerate(cfg): if in_channels != 'S': if v == 'S': layers += [nn.Conv2d(in_channels, cfg[k + 1], kernel_size=(1, 3)[flag], stride=2, padding=1)] else: layers += [nn.Conv2d(in_channels, v, kernel_size=(1, 3)[flag])] flag = not flag in_channels = v return layers
1 2 3 if __name__ == '__main__': layer = extra_net() print(nn.Sequential(*layer))
Part3-Multi-box Layers
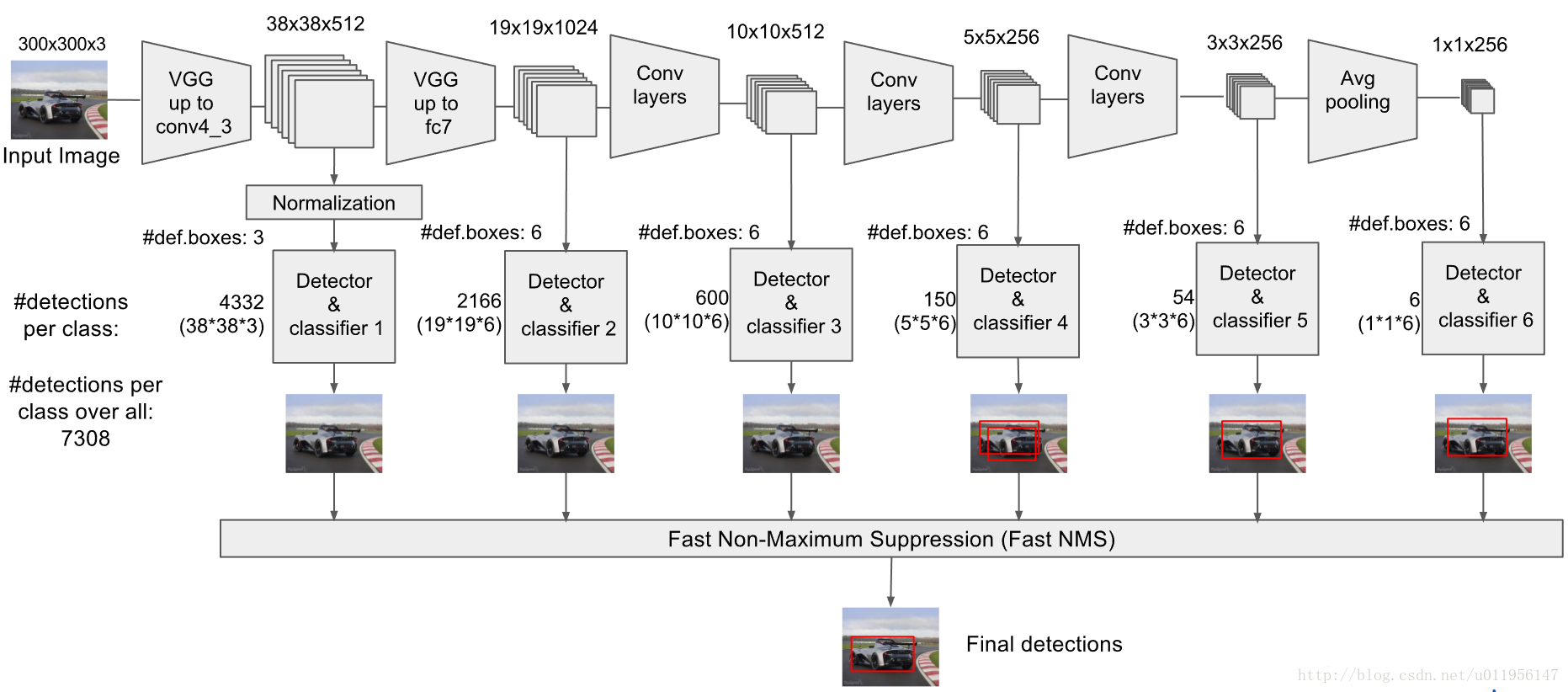
由图片中我们可以看到,从conv4_3开始,SSD一共提取了6个特征图。其大小分别为 (38,38),(19,19),(10,10),(5,5),(3,3),(1,1),但是每个特征图上设置的先验框数量不同。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 multi_box_cfg = [4, 6, 6, 6, 4, 4] # 用于多尺度分析的multi_box def multi_box_net(): """ Return: vgg, extra_layers loc_layers: 多尺度分支的回归网络 conf_layers: 多尺度分支的分类网络 """ vgg_layers = vgg_net() extra_layers = extra_net() loc_layers = [] conf_layers = [] vgg_source = [24, -2] num_classes = 21 cfg = multi_box_cfg for k, v in enumerate(vgg_source): loc_layers += [nn.Conv2d(vgg_layers[v].out_channels, cfg[k] * 4, kernel_size=3, padding=1)] conf_layers += [nn.Conv2d(vgg_layers[v].out_channels, cfg[k] * num_classes, kernel_size=3, padding=1)] for k, v in enumerate(extra_layers[1::2], 2): loc_layers += [nn.Conv2d(v.out_channels, cfg[k] * 4, kernel_size=3, padding=1)] conf_layers += [nn.Conv2d(v.out_channels, cfg[k] * num_classes, kernel_size=3, padding=1)] return vgg_layers, extra_layers, (loc_layers, conf_layers)
1 2 3 4 5 if __name__ == '__main__': vgg_layers, extra_layers, (loc, conf) = multi_box_net() print(nn.Sequential(*loc)) print('---------------------------') print(nn.Sequential(*conf))
Part4-SSD类 在写SSD类之前,我们先要了解几个概念。
Prior Box
SSD从Conv4_3开始,一共提取了6个特征图,其大小分别为 (38,38),(19,19),(10,10),(5,5),(3,3),(1,1),但是每个特征图上设置的先验框数量不同。
尺度$s_k$表示先验框大小相对于图片的比例;
先验框的设置,包括尺度(或者说大小)和长宽比两个方面。对于先验框的尺度,其遵守一个线性递增规则:随着特征图大小降低,先验框尺度线性增加:
对于第一个特征图,尺度取0.1,剩余5个在0.2($s_{min}$)-0.9($s_{max}$)间均匀取值。
由于这样算出的先验框尺寸可能会产生小数,而对于一个300*300的原图像,没有小数的像素,因此,我们将尺度先×100再均分,由此得到的序列为{10,20,37,54,71,88},然后再将其除以100,乘以300(换算成原图中的像素):则先验框尺寸为{30,60,111,162,213,264}
先验框的长宽比$a_r$一般设置为:{1, 2, 3, 1/2, 1/3}
为保证同样的尺寸下,不同长宽比的先验框面积不变,有:$wh=s_k s_k$,同时满足长宽比$w/h=a_r$,由此有:$w=s_k\sqrt{a_r}$,$h=\frac{s_k}{\sqrt{a_r}}$
在以上的基础上,还增加了一个正方形先验框,尺度为$\sqrt{s_k{s_{k+1}}}$,由于最后一个没有$s_{k+1}$,我们设置一个虚拟的$s_{k+1}=315$
因此,每个特征图一共有 6 个先验框 {1,2,3,1/2,1/3,1′} ,但是在实现时,Conv4_3,Conv10_2和Conv11_2层仅使用4个先验框,它们不使用长宽比为 3,1/3 的先验框
由此我们可以写出prior_box类:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 class PriorBox(object): def __init__(self, cfg): super(PriorBox, self).__init__() self.image_size = cfg['min_dim'] # number of priors for feature map location (either 4 or 6) self.num_priors = len(cfg['aspect_ratios']) self.variance = cfg['variance'] or [0.1] self.feature_maps = cfg['feature_maps'] self.min_sizes = cfg['min_sizes'] self.max_sizes = cfg['max_sizes'] self.steps = cfg['steps'] self.aspect_ratios = cfg['aspect_ratios'] self.clip = cfg['clip'] self.version = cfg['name'] for v in self.variance: if v <= 0: raise ValueError('Variances must be greater than 0') def forward(self): mean = [] # 开始遍历特征图 k为下标 f为边长 for k, f in enumerate(self.feature_maps): # 对特征图的每个格子进行操作 for i, j in product(range(f), repeat=2): # steps[k]表示第k个特征图中单个格子的边长大小 f_k = self.image_size / self.steps[k] # 由此cx,cy即为该中心点相对整体的位置 cx = (j + 0.5) / f cy = (i + 0.5) / f # s_k为该特征图对应的尺度 s_k = self.min_sizes[k] / self.image_size # 加入长宽比为1的先验框 mean += [cx, cy, s_k, s_k] # 求出根号s_k*s_k+1,并加入长宽比为1‘的先验框(与上个相比尺度不同) s_k_prime = sqrt(s_k * (self.max_sizes[k]/self.image_size)) mean += [cx, cy, s_k_prime, s_k_prime] # 加入剩下四种先验框 for ar in self.aspect_ratios[k]: mean += [cx, cy, s_k * sqrt(ar), s_k / sqrt(ar)] mean += [cx, cy, s_k / sqrt(ar), s_k * sqrt(ar)] # back to torch land output = torch.Tensor(mean).view(-1, 4) if self.clip: output.clamp_(max=1, min=0) return output
SSD类如下(不包括test部分):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 class SSD(nn.Module): def __init__(self, phase, num_classes=9): super(SSD, self).__init__() self.phase = phase self.num_classes = num_classes # 初始化先验框 self.prior_box = PriorBox(HiXray_cfg) self.priors = self.prior_box.forward() self.vgg = nn.ModuleList(vgg_net()) self.L2Norm = L2Norm(512, 20) self.extra = nn.ModuleList(extra_net()) head = multi_box_net() self.loc = nn.ModuleList(head[0]) self.conv = nn.ModuleList(head[1]) // 下面这部分到Detect再说 if phase == 'test': self.softmax = nn.Softmax() self.detect = Detect()
Part5-损失函数 SSD的损失函数包括两部分的加权:
位置损失函数 $L_loc$
置信度损失函数 $L_conf$
我们首先了解一下$L_1\ Loss$,$L_2\ Loss$,和$Smooth\ L_1\ Loss$
L1 Loss 公式为:$L_1=\sum_{i=1}^n{|y_i-f(x_i)|}$
设x为预测值与真实值之间的差异,则$L_1=|x|$
特点:
L1 Loss在零点处不平滑
L1损失函数对差异x的导数为常数,因此如果学习率不变,损失函数会在稳定值附近波动,很难收敛
L2 Loss 公式为:$L_2=\sum_{i=1}^n{(y_i-f(x_i))^2}$
设x为预测值与真实值之间的差异,则$L_2=x^2$
特点:
L2 loss由于是平方增长,因此学习快 。
L2损失函数对x的导数为2x,当x很大的时候,导数也很大,使 L2 损失在总loss 中占据主导位置,进而导致,训练初期不稳定 。
Smooth L1 Loss 在Fast RCNN论文中被首次提出
公式:设x为预测值与真实值之间的差异:
$$Smooth_{L_1}=\begin{cases}0.5x^2 & |x| < 1\|x|-0.5 & |x|>=1 \end{cases}$$
特点:
相比L1 Loss,Smooth L1 Loss解决了零点不平滑的问题
相比L2 Loss,Smooth L1 Loss在x较大的时候变化比较缓慢